Project
Cormas
Agent-based modelling platform for participatory simulation and companion modelling.
Cormas is an open-source platform for agent-based modelling (ABM) used to study complex socio-ecological systems. It is developed at CIRAD and widely used in the Companion Modelling (ComMod) approach, where researchers and stakeholders collaboratively design and explore models.
What it does
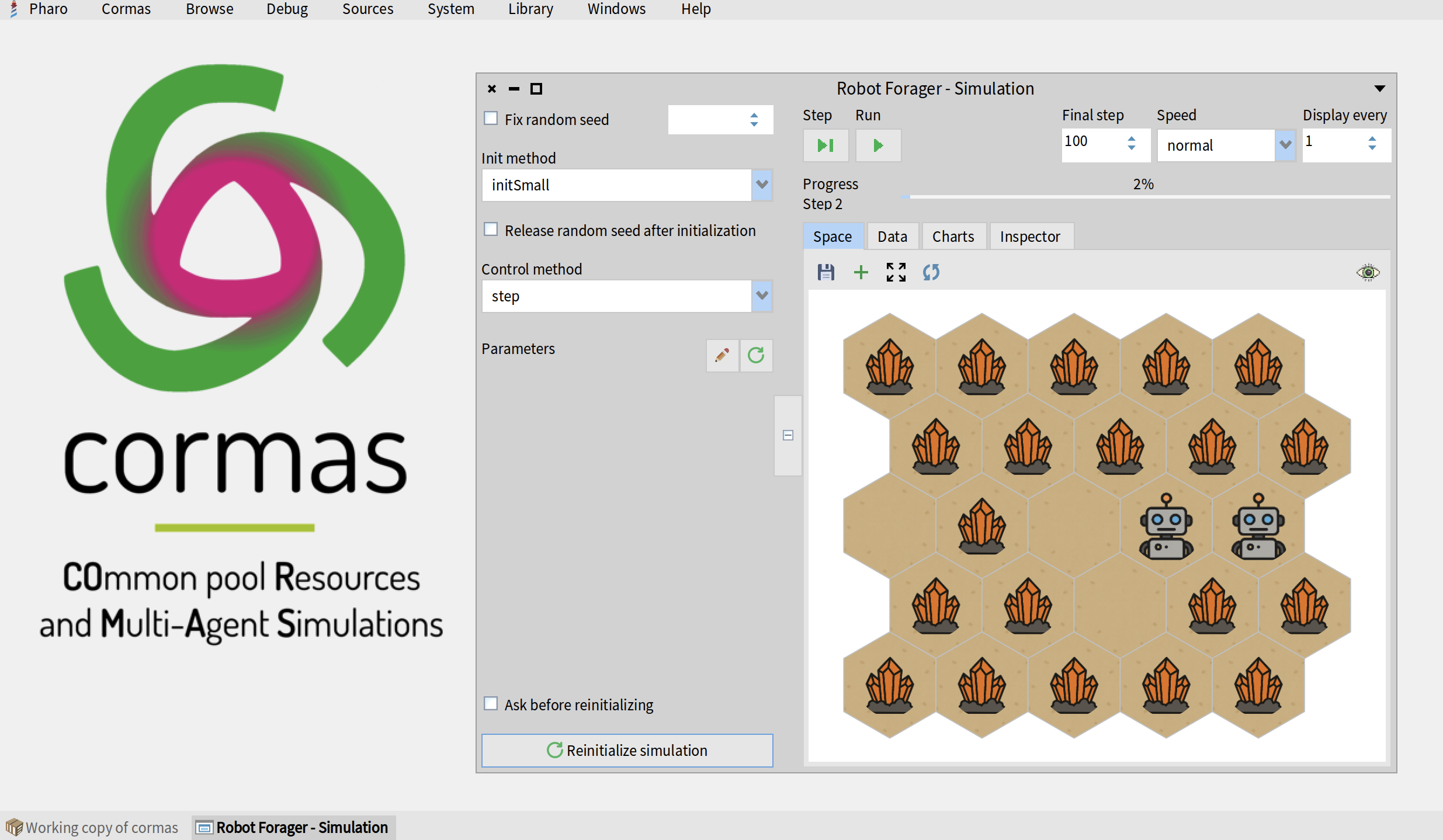
Cormas models systems as interacting agents within spatial environments.
- agents represent stakeholders (farmers, institutions, animals)
- environments represent resources (land, water, vegetation)
- simulations capture decisions, interactions, and emergent dynamics
It is particularly suited for resource management, agriculture, and environmental systems.
Key features
- Agent-based modelling with heterogeneous behaviors
- Spatial modelling (grids, GIS integration)
- Participatory simulation for workshops and collective decision-making
- Live programming in Pharo for interactive modelling
- Serious games integration where simulations become playable
Why it matters
Cormas bridges science and practice by enabling:
- exploration of scenarios
- stakeholder engagement
- social learning and negotiation
It is used worldwide in research, development projects, and education.
My contributions
I contribute to the modernization and evolution of Cormas:
- migration from VisualWorks to Pharo
- redesign of the user interface (Spec2)
- development of a playable architecture for serious games
- integration with web tools and data platforms
- support for the community (documentation, training, events)